DR HACK
Davide Rosa Hack
155282
 | Oggi | 438 |
 | Ieri | 1371 |
 | Questa settimana | 5163 |
 | Questo Mese | 5312 |
 | Tutto | 155282 |
Utenti 0
Visitatori 12
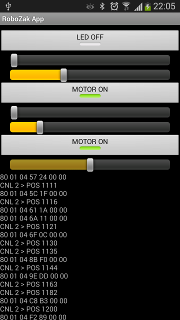
RoboZak
In questa sezione viene fatto un esempio di un'app per il progetto IOIO RoboZak
Classe per il controllo dei motori:
package robozak.examples.simple;
import java.io.IOException;
import java.io.InputStream;
import java.io.OutputStream;
import ioio.lib.api.Uart;
public class Motore {
int min_pos;
int max_pos;
int cur_pos ;
int tmr_out ;
int motor_id;
int buff_siz = 7;
byte[] buff_out = new byte[buff_siz];
byte[] buff_inp = new byte[buff_siz];
InputStream uart_rx;
OutputStream uart_tx;
public Motore(){
min_pos = 600;
max_pos = 2400;
cur_pos = (min_pos + max_pos)/2;
tmr_out = 100;
motor_id = 0;
}
public Motore(Uart urt, int id, int speed, StringBuilder msg) throws IOException{
min_pos = 600;
max_pos = 2400;
cur_pos = (min_pos + max_pos)/2;
tmr_out = 100;
motor_id = 0;
set_uart(urt);
set_motor_id(id);
msg.append(Motor_off() + "- ");
msg.append(Motor_speed(speed));
}
byte Tx_chk() {
return (byte)(256 - (int)((int)((int)buff_out[0] + (int)buff_out[1] + (int)buff_out[2] + (int)buff_out[3]) % 256) % 256);
}
byte Rx_chk() {
return (byte)(256 - (int)((int)((int)buff_inp[0] + (int)buff_inp[1] + (int)buff_inp[2] + (int)buff_inp[3]) % 256) % 256);
}
String Motor_send() throws IOException{
StringBuilder sb = new StringBuilder();
buff_out[4] = Tx_chk();
buff_out[5] = (byte)0x00;
buff_out[6] = (byte)0x00;
sb.append(flush_rx());
uart_tx.write(buff_out);
uart_tx.flush();
try{
long tout = System.currentTimeMillis() + tmr_out;
while(uart_rx.available() < buff_siz){
Thread.yield();
if (System.currentTimeMillis() > tout){
break;
}
}
uart_rx.read(buff_inp, 0, buff_siz);
for (byte x : buff_inp){
sb.append(String.format("%02X ", x));
}
if (Tx_chk() != Rx_chk()) {
sb.append("Error crc");
} else if (buff_out[1] == (byte)0xE9){
cur_pos = (((int)buff_inp[5] * 256) + (int)buff_inp[6]) ;
}
} catch(Exception e) {
sb.append("Error input");
}
return sb.toString();
}
public String flush_rx() throws IOException{
StringBuilder sb = new StringBuilder();
int inav = uart_rx.available();
if(inav > 0){
byte[] buff_tmp = new byte[inav];
uart_rx.read(buff_tmp, 0, inav);
for (byte x : buff_tmp){
sb.append(String.format("%02X ", x));
}
} else {
//sb.append("No input");
}
return sb.toString();
}
public int get_cur_pos(){
return cur_pos;
}
public void set_uart(Uart urt){
uart_tx = urt.getOutputStream();
uart_rx = urt.getInputStream();
}
public void set_motor_id(int id){
motor_id = id;
}
public void set_min_pos(int pos){
min_pos = pos;
}
public void set_max_pos(int pos){
max_pos = pos;
}
public String Motor_off() throws IOException{
buff_out[0] = (byte)0x80;
buff_out[1] = (byte)0xEB;
buff_out[2] = (byte)motor_id;
buff_out[3] = (byte)0x00;
return Motor_send();
}
public String Motor_on() throws IOException{
buff_out[0] = (byte)0x80;
buff_out[1] = (byte)0xEB;
buff_out[2] = (byte)motor_id;
buff_out[3] = (byte)0x01;
return Motor_send();
}
public String Motor_speed(int speed) throws IOException{
if (speed < 0){
speed = 0;
} else if(speed > 100) {
speed = 100;
}
buff_out[0] = (byte)0x80;
buff_out[1] = (byte)0xE9;
buff_out[2] = (byte)motor_id;
buff_out[3] = (byte)speed;
return Motor_send();
}
public String Motor_pos(int pos) throws IOException{
if (pos < min_pos){
pos = min_pos;
} else if (pos > max_pos) {
pos = max_pos;
}
buff_out[0] = (byte)0x80;
buff_out[1] = (byte)motor_id;
byte hit = (byte)(int)(pos / 256);
buff_out[2] = hit;
byte low = (byte)(pos % 256);
buff_out[3] = low;
cur_pos = pos;
return Motor_send();
}
}
File Activity main.xml
<?xml version="1.0" encoding="utf-8"?>
<LinearLayout xmlns:android="http://schemas.android.com/apk/res/android"
android:layout_width="fill_parent"
android:layout_height="fill_parent"
android:orientation="vertical" >
<LinearLayout
android:layout_width="match_parent"
android:layout_height="wrap_content"
android:orientation="vertical"
android:paddingTop="20px" >
<ToggleButton
android:id="@+id/toggleButton3"
android:layout_width="match_parent"
android:layout_height="wrap_content"
android:text="ToggleButton"
android:textOff="LED OFF"
android:textOn="LED ON" />
<SeekBar
android:id="@+id/seekBar1"
android:layout_width="match_parent"
android:layout_height="wrap_content"
android:max="@integer/IDMOTORI"
android:paddingLeft="20dp"
android:paddingRight="20dp"
android:progress="0" />
<SeekBar
android:id="@+id/seekBar2"
android:layout_width="match_parent"
android:layout_height="wrap_content"
android:layout_weight="1"
android:max="@integer/GRADIMOTORE"
android:paddingLeft="20dp"
android:paddingRight="20dp"
android:progress="1" />
<ToggleButton
android:id="@+id/toggleButton1"
android:layout_width="match_parent"
android:layout_height="wrap_content"
android:text="ToggleButton"
android:textOff="MOTOR OFF"
android:textOn="MOTOR ON" />
<SeekBar
android:id="@+id/seekBar3"
android:layout_width="match_parent"
android:layout_height="wrap_content"
android:layout_weight="1"
android:max="@integer/IDMOTORI"
android:paddingLeft="20dp"
android:paddingRight="20dp"
android:progress="0" />
<SeekBar
android:id="@+id/seekBar4"
android:layout_width="match_parent"
android:layout_height="wrap_content"
android:layout_weight="1"
android:max="@integer/GRADIMOTORE"
android:paddingLeft="20dp"
android:paddingRight="20dp"
android:progress="1" />
<ToggleButton
android:id="@+id/toggleButton2"
android:layout_width="match_parent"
android:layout_height="wrap_content"
android:text="ToggleButton"
android:textOff="MOTOR OFF"
android:textOn="MOTOR ON" />
<SeekBar
android:id="@+id/seekBar5"
android:layout_width="match_parent"
android:layout_height="wrap_content"
android:max="100"
android:paddingLeft="20dp"
android:paddingRight="20dp"
android:progress="50" />
</LinearLayout>
<TextView
android:id="@+id/textView1"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:textAppearance="?android:attr/textAppearanceSmall" />
</LinearLayout>
File RoboZakApp.java
package robozak.examples.simple;
import java.io.IOException;
import ioio.lib.api.DigitalOutput;
import ioio.lib.api.IOIO;
import ioio.lib.api.Uart;
import ioio.lib.api.exception.ConnectionLostException;
import ioio.lib.util.BaseIOIOLooper;
import ioio.lib.util.IOIOLooper;
import ioio.lib.util.android.IOIOActivity;
import android.os.Bundle;
import android.widget.SeekBar;
import android.widget.SeekBar.OnSeekBarChangeListener;
import android.widget.TextView;
import android.widget.ToggleButton;
public class RoboZakApp extends IOIOActivity {
TextView textView_;
SeekBar seekBar1;
SeekBar seekBar2;
SeekBar seekBar3;
SeekBar seekBar4;
SeekBar seekBar5;
ToggleButton toggleButton3;
ToggleButton toggleButton1;
ToggleButton toggleButton2;
int oldpos1;
int oldpos2;
int oldsped;
int oldmot1;
int oldmot2;
boolean oldmotoronoff1;
boolean oldmotoronoff2;
int cnrlog = 0;
@Override
public void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.main);
textView_ = (TextView)findViewById(R.id.textView1);
seekBar1 = (SeekBar)findViewById(R.id.seekBar1);
seekBar2 = (SeekBar)findViewById(R.id.seekBar2);
seekBar3 = (SeekBar)findViewById(R.id.seekBar3);
seekBar4 = (SeekBar)findViewById(R.id.seekBar4);
seekBar5 = (SeekBar)findViewById(R.id.seekBar5);
toggleButton3 = (ToggleButton)findViewById(R.id.toggleButton3);
toggleButton1 = (ToggleButton)findViewById(R.id.toggleButton1);
toggleButton2 = (ToggleButton)findViewById(R.id.toggleButton2);
seekBar1.setOnSeekBarChangeListener(new OnSeekBarChangeListener(){
@Override
public void onProgressChanged(SeekBar seekBar, int progress,
boolean fromUser) {
// TODO Auto-generated method stub
setText("CNL 1 > MOT " + Integer.toString(seekBar1.getProgress() + 1));
}
@Override
public void onStartTrackingTouch(SeekBar seekBar) {
// TODO Auto-generated method stub
}
@Override
public void onStopTrackingTouch(SeekBar seekBar) {
// TODO Auto-generated method stub
}
});
seekBar2.setOnSeekBarChangeListener(new OnSeekBarChangeListener(){
@Override
public void onProgressChanged(SeekBar seekBar, int progress,
boolean fromUser) {
// TODO Auto-generated method stub
setText("CNL 1 > POS " + Integer.toString(seekBar2.getProgress() + 600));
}
@Override
public void onStartTrackingTouch(SeekBar seekBar) {
// TODO Auto-generated method stub
}
@Override
public void onStopTrackingTouch(SeekBar seekBar) {
// TODO Auto-generated method stub
}
});
seekBar3.setOnSeekBarChangeListener(new OnSeekBarChangeListener(){
@Override
public void onProgressChanged(SeekBar seekBar, int progress,
boolean fromUser) {
// TODO Auto-generated method stub
setText("CNL 2 > MOT " + Integer.toString(seekBar3.getProgress() + 1));
}
@Override
public void onStartTrackingTouch(SeekBar seekBar) {
// TODO Auto-generated method stub
}
@Override
public void onStopTrackingTouch(SeekBar seekBar) {
// TODO Auto-generated method stub
}
});
seekBar4.setOnSeekBarChangeListener(new OnSeekBarChangeListener(){
@Override
public void onProgressChanged(SeekBar seekBar, int progress,
boolean fromUser) {
// TODO Auto-generated method stub
setText("CNL 2 > POS " + Integer.toString(seekBar4.getProgress() + 600));
}
@Override
public void onStartTrackingTouch(SeekBar seekBar) {
// TODO Auto-generated method stub
}
@Override
public void onStopTrackingTouch(SeekBar seekBar) {
// TODO Auto-generated method stub
}
});
seekBar5.setOnSeekBarChangeListener(new OnSeekBarChangeListener(){
@Override
public void onProgressChanged(SeekBar seekBar, int progress,
boolean fromUser) {
// TODO Auto-generated method stub
setText("CNL x > VEL " + Integer.toString(seekBar5.getProgress() + 1));
}
@Override
public void onStartTrackingTouch(SeekBar seekBar) {
// TODO Auto-generated method stub
}
@Override
public void onStopTrackingTouch(SeekBar seekBar) {
// TODO Auto-generated method stub
}
});
enableUi(false);
}
class Looper extends BaseIOIOLooper {
DigitalOutput led_;
Uart uart1;
Uart uart2;
Motore[] sin = new Motore[11];
Motore[] des = new Motore[11];
@Override
public void setup() throws ConnectionLostException, InterruptedException {
try {
oldpos1 = -1;
oldpos2 = -1;
oldsped = -1;
oldmot1 = -1;
oldmot2 = -1;
led_ = ioio_.openDigitalOutput(IOIO.LED_PIN, true);
uart1 = ioio_.openUart(5, 3, 19200, Uart.Parity.NONE, Uart.StopBits.TWO);
uart2 = ioio_.openUart(6, 4, 19200, Uart.Parity.NONE, Uart.StopBits.TWO);
oldmotoronoff1 =! toggleButton1.isChecked();
oldmotoronoff2 =! toggleButton2.isChecked();
for (int i=0;i<11;i++){
StringBuilder sb = new StringBuilder();
sin[i] = new Motore(uart1, i+1, seekBar5.getProgress(), sb);
setText(sb.toString());
sb = new StringBuilder();
des[i] = new Motore(uart2, i+1, seekBar5.getProgress(), sb);
setText(sb.toString());
}
enableUi(true);
} catch (ConnectionLostException e) {
setText("Connection Lost Exception");
enableUi(false);
throw e;
} catch (IOException e) {
// TODO Blocco catch generato automaticamente
e.printStackTrace();
}
}
@Override
public void loop() throws ConnectionLostException {
try {
led_.write(!toggleButton3.isChecked());
if (toggleButton1.isChecked()!=oldmotoronoff1){
oldmotoronoff1 = toggleButton1.isChecked();
if (oldmotoronoff1 == true) {
setText(sin[seekBar1.getProgress()].Motor_on());
} else {
setText(sin[seekBar1.getProgress()].Motor_off());
}
}
if (toggleButton2.isChecked()!=oldmotoronoff2){
oldmotoronoff2 = toggleButton2.isChecked();
if (oldmotoronoff1 == true) {
setText(des[seekBar1.getProgress()].Motor_on());
} else {
setText(des[seekBar1.getProgress()].Motor_off());
}
}
if (oldmot1 != seekBar1.getProgress()) {
oldmot1 = seekBar1.getProgress();
setText(sin[seekBar1.getProgress()].Motor_speed(seekBar5.getProgress()));
setTextseekBar2(sin[seekBar1.getProgress()].get_cur_pos() - 600);
}
if (oldpos1 != seekBar2.getProgress()) {
oldpos1 = seekBar2.getProgress();
setText(sin[seekBar1.getProgress()].Motor_pos(seekBar2.getProgress() + 600));
}
if (oldmot2 != seekBar3.getProgress()) {
oldmot2 = seekBar3.getProgress();
setText(des[seekBar3.getProgress()].Motor_speed(seekBar5.getProgress()));
setTextseekBar4(des[seekBar3.getProgress()].get_cur_pos() - 600);
}
if (oldpos2 != seekBar4.getProgress()) {
oldpos2 = seekBar4.getProgress();
setText(des[seekBar3.getProgress()].Motor_pos(seekBar4.getProgress() + 600));
}
if (oldsped != seekBar5.getProgress()) {
oldsped = seekBar5.getProgress();
oldmot1 = -1;
oldmot2 = -1;
}
Thread.sleep(10);
} catch (InterruptedException e) {
setText("Interrupted Exception");
ioio_.disconnect();
enableUi(false);
} catch (ConnectionLostException e) {
setText("Connection Lost Exception");
enableUi(false);
throw e;
} catch (IOException e) {
setText("IO Exception");
e.printStackTrace();
}
}
}
@Override
protected IOIOLooper createIOIOLooper() {
return new Looper();
}
private void enableUi(final boolean enable) {
runOnUiThread(new Runnable() {
@Override
public void run() {
seekBar1.setEnabled(enable);
seekBar2.setEnabled(enable);
seekBar3.setEnabled(enable);
seekBar4.setEnabled(enable);
seekBar5.setEnabled(enable);
toggleButton3.setEnabled(enable);
toggleButton1.setEnabled(enable);
toggleButton2.setEnabled(enable);
setText("Connesso " + Boolean.toString(enable));
}
});
}
private void setText(final String str) {
runOnUiThread(new Runnable() {
@Override
public void run() {
if (cnrlog < 50){
cnrlog +=1;
textView_.setText(str + "\n" + textView_.getText());
} else {
cnrlog =0;
textView_.setText(str);
}
}
});
}
private void setTextseekBar2(final int prog) {
runOnUiThread(new Runnable() {
@Override
public void run() {
seekBar2.setProgress(prog);
}
});
}
private void setTextseekBar4(final int prog) {
runOnUiThread(new Runnable() {
@Override
public void run() {
seekBar4.setProgress(prog);
}
});
}
}
File integers.xml
<?xml version="1.0" encoding="utf-8"?>
<resources>
<integer name="GRADIMOTORE">3000</integer>
<integer name="IDMOTORI">10</integer>
</resources>